Adding collision detection capability to our robot
In this post we will be adding the capability of collision detection to our Raspberry PI based robot. A lot of the information that is shared here is derived from the following guide: https://circuitdigest.com/microcontroller-projects/raspberry-pi-obstacle-avoiding-robot
The data sheet of the sensor module that we are using is available here: https://cdn.sparkfun.com/datasheets/Sensors/Proximity/HCSR04.pdf
We will be using the distance sensor APIs provided in the GPIO zero package https://gpiozero.readthedocs.io/en/stable/recipes.html#distance-sensor
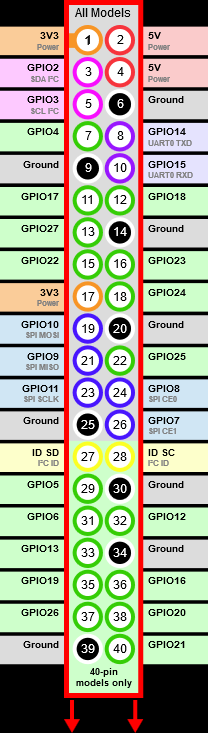
While the VCC of 5V and GND can be shared with the existing circuit, we will need a couple of new GPIOs for the distance sensor. We need one line for the trigger and one line for the echo.
We are using GPIO17 (Trigger) and GPIO27(Echo)
Test script:
from gpiozero import DistanceSensor
from time import sleep
sensor = DistanceSensor(17, 27)
while True:
print('Distance to nearest object is', sensor.distance, 'm')
sleep(1)
Output:
========================= RESTART =========================
>>> %Run test_ultrasound_sensor.py
Distance to nearest object is 0.447670080721598 m
Distance to nearest object is 0.44841220883714866 m
Distance to nearest object is 0.4475628119743078 m
Distance to nearest object is 0.44842988673531864 m
Distance to nearest object is 0.3191705281076008 m
Distance to nearest object is 0.44960091821184506 m
Distance to nearest object is 0.44661507110784215 m
Distance to nearest object is 0.46784553048264 m
Distance to nearest object is 0.44570337255045617 m
This is a fairly easy exercise. Since our ultrasonic distance sensor is only present in the front of the robot chassis, we add a check for the distance before executing the forward movement.
$ cat cgi-bin/forward.py
#!/usr/bin/pythonRoot
print "Content-type:text/html\n"
##print "<h1>This is the Home Page</h1>"
import cgi,cgitb
cgitb.enable() #for debugging
from gpiozero import Robot
from time import sleep
from gpiozero import DistanceSensor
sensor = DistanceSensor(17,27)
if ( sensor.distance*100 < 20):
print "Distance is less than 20 cm, cannot proceed with command\n"
raise SystemExit
robby = Robot (left=(6,13), right=(26,19))
robby.forward()
sleep(.5) # for < ~1 ft distance
robby.stop()
All the code is available in Bitbucket. Use the following command to download the repo:
git clone https://boseontherocks@bitbucket.org/boseontherocks/projects_1.git
The code used in this post is available in the folder robot_3.
It also includes a test script for the ultrasound distance sensor.